

|
|
Robô do CNC do braço IRB4600 do robô de ABB com o prendedor elétrico para o trabalho da picareta e do lugar com máquina de dobra

| Versão do robô | Repetibilidade RP da posição (milímetros) | Repetibilidade RT do trajeto (milímetro) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
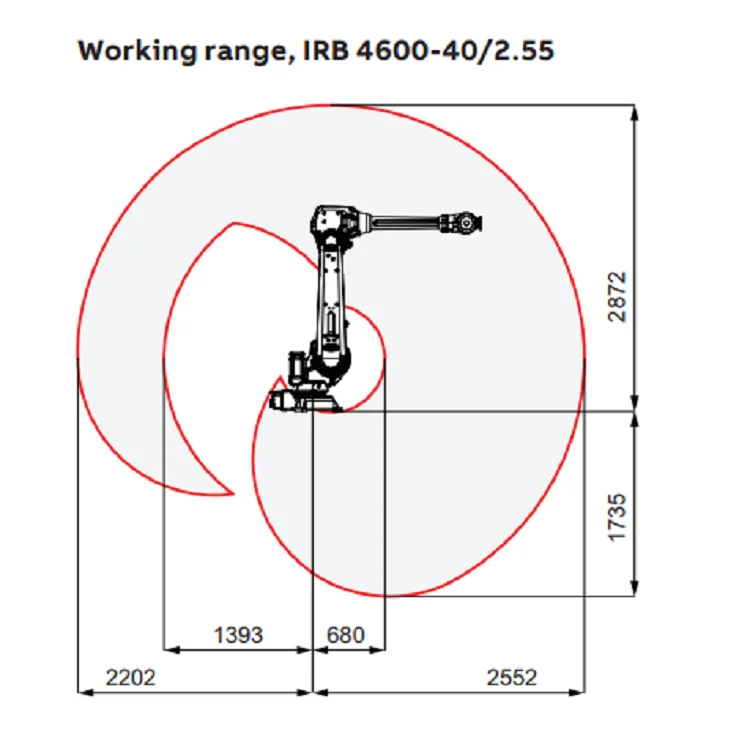
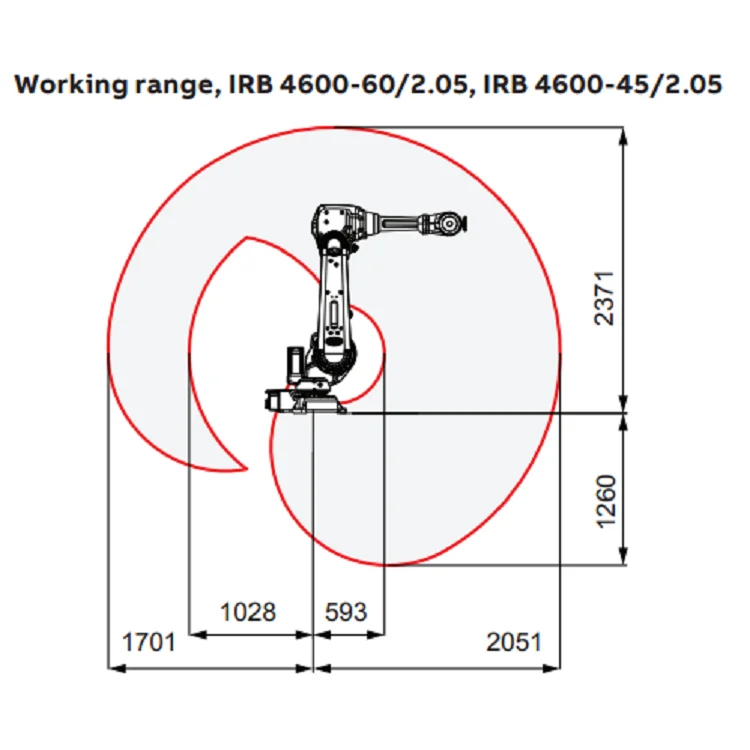
| Versões do robô | Alcance (m) | Carga útil (quilogramas) | Armload (quilogramas) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Número de machados | 6+3 externos (até 36 com MultiMove) | |||
| Proteção | IP67 padrão, como a fundição da opção mais 2 | |||
| Montagem | Assoalho, prateleira, invertida ou inclinada | |||
| Controlador | Único armário IRC5, | |||

|
|
Robô do CNC do braço IRB4600 do robô de ABB com o prendedor elétrico para o trabalho da picareta e do lugar com máquina de dobra
| Versão do robô | Repetibilidade RP da posição (milímetros) | Repetibilidade RT do trajeto (milímetro) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Versões do robô | Alcance (m) | Carga útil (quilogramas) | Armload (quilogramas) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Número de machados | 6+3 externos (até 36 com MultiMove) | |||
| Proteção | IP67 padrão, como a fundição da opção mais 2 | |||
| Montagem | Assoalho, prateleira, invertida ou inclinada | |||
| Controlador | Único armário IRC5, | |||


