|
|
| MOQ: | 1 |
| Preço: | 1500$ |
| embalagem padrão: | 169 cm (A), 75 cm (L), 30 cm (C) |
| Período de entrega: | 1 mês |
| Capacidade de abastecimento: | 99 unidades |
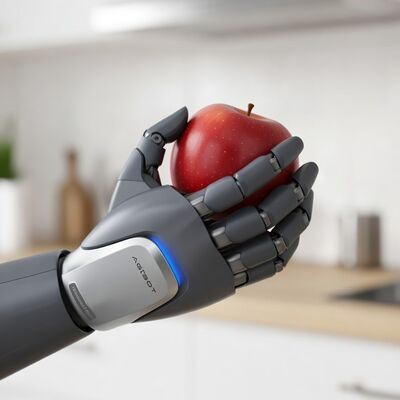
O novo AGIBOT OmniHand Pro 2025 Five-Finger Humanoid Robot Hand é um efetor robótico avançado projetado para imitar o movimento da mão humana com precisão e flexibilidade.Esta mão robótica de cinco dedos suporta movimentos coordenados dos dedos, agarrar de alta precisão e feedback de força inteligente para tarefas de manipulação complexas.
O OmniHand Pro 2025 é adequado para robôs humanóides, plataformas de pesquisa de robôs de serviço e braços robóticos industriais que exigem movimento natural da mão.Manipulação adaptativa de objetos e interação segura homem-robô.
Cada dedo pode se mover de forma independente para realizar agarrar e manipular naturalmente, semelhante ao movimento da mão humana.
Os sensores de força e tátil integrados permitem o controle de aderência adaptativo com base na forma, peso e fragilidade do objeto.
O controlo suave e preciso de múltiplas articulações permite manobras delicadas e tarefas de manipulação complexas.
Algoritmos avançados de controlo digital permitem um movimento rápido e um ajuste em tempo real para uma operação estável.
Suporta a integração com robôs humanóides, braços robóticos e robôs de serviço através de comunicações padrão e interfaces de montagem.
As opções de configuração flexíveis permitem a personalização para tarefas específicas ou sistemas robóticos.
| Ponto | Especificações |
|---|---|
| Tipo de produto | Mão robótica humanoide de cinco dedos |
| Graus de liberdade | Dedos independentes com várias articulações |
| Método de controlo | Controle digital inteligente |
| Sensores | Força e retroalimentação táctil |
| Compatibilidade | Robôs humanoides e braços robóticos |
| Comunicação | Interfaces de robótica padrão |
| Integração | Instalação e controlo modular |
| Fornecimento de energia | Sistema externo alimentado |
| Ambiente de funcionamento | Espaços industriais e de investigação interiores |
As especificações podem variar consoante a configuração.
O AGIBOT OmniHand Pro 2025 combina um design mecânico semelhante ao humano com sensores e controle inteligentes para suportar a próxima geração de robôs humanóides e plataformas robóticas avançadas.Oferece manipulação de alto desempenho e maior flexibilidade para futuras aplicações.
É uma mão robótica humanoide de cinco dedos projetada para manipulação avançada e movimento humano na robótica.
Suporta integração com robôs humanoides, braços robóticos e robôs de serviço usando interfaces padrão.
Pode realizar agarrar, manusear, manipular objetos e tarefas delicadas que exigem precisão e controle adaptativo.
Sim, sensores de força e táctil integrados permitem o controlo adaptativo do aperto baseado no feedback do contacto.
É amplamente utilizado em laboratórios de investigação de robótica de IA e ambientes de ensino para estudos avançados de manipulação.
Sim, o seu design modular permite personalização para diferentes aplicações e requisitos do sistema.
|
|
| MOQ: | 1 |
| Preço: | 1500$ |
| embalagem padrão: | 169 cm (A), 75 cm (L), 30 cm (C) |
| Período de entrega: | 1 mês |
| Capacidade de abastecimento: | 99 unidades |
O novo AGIBOT OmniHand Pro 2025 Five-Finger Humanoid Robot Hand é um efetor robótico avançado projetado para imitar o movimento da mão humana com precisão e flexibilidade.Esta mão robótica de cinco dedos suporta movimentos coordenados dos dedos, agarrar de alta precisão e feedback de força inteligente para tarefas de manipulação complexas.
O OmniHand Pro 2025 é adequado para robôs humanóides, plataformas de pesquisa de robôs de serviço e braços robóticos industriais que exigem movimento natural da mão.Manipulação adaptativa de objetos e interação segura homem-robô.
Cada dedo pode se mover de forma independente para realizar agarrar e manipular naturalmente, semelhante ao movimento da mão humana.
Os sensores de força e tátil integrados permitem o controle de aderência adaptativo com base na forma, peso e fragilidade do objeto.
O controlo suave e preciso de múltiplas articulações permite manobras delicadas e tarefas de manipulação complexas.
Algoritmos avançados de controlo digital permitem um movimento rápido e um ajuste em tempo real para uma operação estável.
Suporta a integração com robôs humanóides, braços robóticos e robôs de serviço através de comunicações padrão e interfaces de montagem.
As opções de configuração flexíveis permitem a personalização para tarefas específicas ou sistemas robóticos.
| Ponto | Especificações |
|---|---|
| Tipo de produto | Mão robótica humanoide de cinco dedos |
| Graus de liberdade | Dedos independentes com várias articulações |
| Método de controlo | Controle digital inteligente |
| Sensores | Força e retroalimentação táctil |
| Compatibilidade | Robôs humanoides e braços robóticos |
| Comunicação | Interfaces de robótica padrão |
| Integração | Instalação e controlo modular |
| Fornecimento de energia | Sistema externo alimentado |
| Ambiente de funcionamento | Espaços industriais e de investigação interiores |
As especificações podem variar consoante a configuração.
O AGIBOT OmniHand Pro 2025 combina um design mecânico semelhante ao humano com sensores e controle inteligentes para suportar a próxima geração de robôs humanóides e plataformas robóticas avançadas.Oferece manipulação de alto desempenho e maior flexibilidade para futuras aplicações.
É uma mão robótica humanoide de cinco dedos projetada para manipulação avançada e movimento humano na robótica.
Suporta integração com robôs humanoides, braços robóticos e robôs de serviço usando interfaces padrão.
Pode realizar agarrar, manusear, manipular objetos e tarefas delicadas que exigem precisão e controle adaptativo.
Sim, sensores de força e táctil integrados permitem o controlo adaptativo do aperto baseado no feedback do contacto.
É amplamente utilizado em laboratórios de investigação de robótica de IA e ambientes de ensino para estudos avançados de manipulação.
Sim, o seu design modular permite personalização para diferentes aplicações e requisitos do sistema.